








מודול טווח לייזר 5 ק"מ
מבוא מוצר
05xld08x מאמצת את מודול הלייזר הזכוכית של ארביום 1535 ננומטר, שפותח באופן עצמאי על ידי Xinalnd, שיש לו את המאפיינים של נמוך
צריכת חשמל, מבנה קומפקטי, דיוק גבוה, מרחק מדידה ארוך ובטיחות עיניים אנושיות.
טווח מדידה מקסימלי: 5000 מ '(2.3x2.3 מ' מכונית) 8000 מ '(בניין)
דיוק נע ± 1 מ '
דיוק מדידה גדול או שווה ל 98%
משקל פחות או שווה ל 85 גרם

תכונות מוצר
1.
יכולת הסתגלות סביבתית, 05xld08x תכנון תת-בית מעגלי, עיצוב בידוד כוח, אלקטרומגנטי חזק
תאימות, המתאימה למכשירים ניידים כף יד, תרמילי UVA ושילוב אופטו -אלקטרוני אחר;
2. שימוש בשדה ראייה קטן, טכנולוגיית תכנון אופטי לא תרמי, עם יכולת דיכוי רעש אופטית טובה,
ביצועי טווח קרוב וביצועים אופטיים גבוהים ונמוכים בטמפרטורה;
3. הממשק הפנימי של המעגל מאמץ את תהליך החיבור הישיר של חוט הריתוך, שהוא יציב ואמין, אשר
יכול להימנע מקצר או מגע לקוי הנגרם כתוצאה מתרופפות, חמצון ואדי מים של המחבר, ולשפר את האמינות וחייו של המוצר.
מדד ביצועי המוצר
|
פָּרִיט |
מַדָד |
|
דֶגֶם |
05xld08x |
|
אורך גל הפעלה |
1535nm ± 10nm |
|
טווח נע |
50m-8000m |
|
|
יכולת נע |
8000m |
יעד גדול, נראות גדולה או שווה ל 25 ק"מ |
|
5000m |
נראות גדולה או שווה ל 1 0 ק"מ, יעדו עם 0.3 רפלקטיביות לרכבים של 2.3 מ '× 2.3 מ' |
|
|
לַחוּת |
פחות או שווה ל 80% |
|
|
דיוק נע |
±1m |
|
|
שיעור דיוק |
גדול או שווה ל 98% |
|
|
רזולוציית טווח |
פחות או שווה ל 40 מ ' |
|
|
זווית סטייה |
פחות או שווה ל- 0. 5MRAD |
|
|
תדר נע |
פעם, 1Hz, 5Hz |
|
|
גוֹדֶל |
פחות או שווה ל 62 מ"מ × 42 מ"מ × 32 מ"מ |
|
|
מֶתַח |
10V-14V |
|
|
צריכת חשמל עבודה |
פחות או שווה ל- 4W |
|
|
צריכת חשמל המתנה |
פחות או שווה ל- 1.8W |
|
|
טמפרטורת עבודה |
-40 תואר -+60 תואר |
|
|
טמפרטורת אחסון |
-55 תואר -+70 תואר |
|
|
מִשׁקָל |
פחות או שווה ל 85 גרם |
|
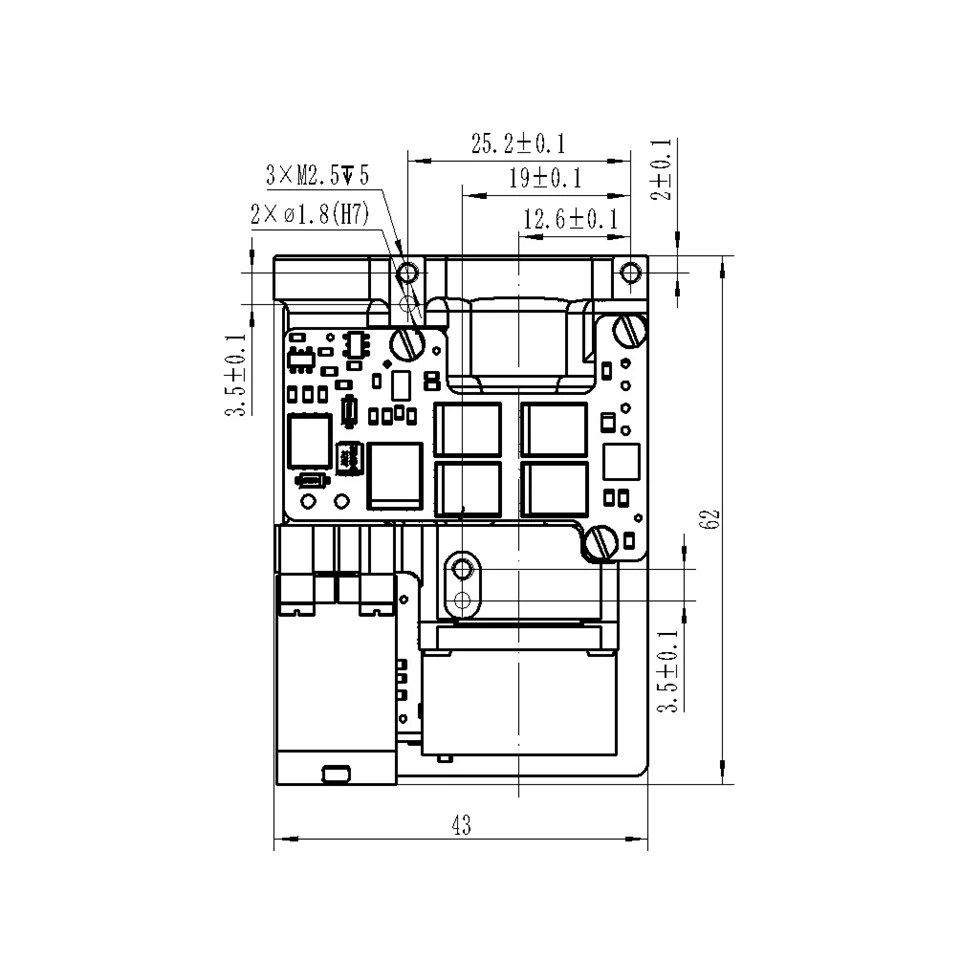
ממשק התקנת מבנה


ממשק חשמלי
דרישות הממשק החשמלי הן כדלקמן:
מתח אספקת חשמל: 12V (10V ~ 14V);
צריכת חשמל עבודה: פחות או שווה ל- 4W;
צריכת חשמל המתנה: פחות או שווה ל 1.8 וולט.
קצה המחשב העליון מקושר לצלב עם קצה הדפדף דרך מחבר 10 סינים עם מרווח של 1.25 מ"מ. הסיכה
הגדרת אספקת החשמל ויציאת התקשורת מוצגת בטבלה הבאה, ומיקומו של סיכה 1 של המחבר מוצג
באיור הבא.
הגדרת סיכה של אספקת חשמל ויציאת תקשורת בסוף טווח
|
מספר סיכה |
מִספָּר |
הגדרת מאפיינים חשמליים |
הערות |
|
P-1 |
VIN+ |
כוח קלט חיובי |
|
|
P-2 |
VIN- |
עמוד שלילי של כוח קלט |
|
|
P-3 |
NC |
||
|
P-4 |
RS 422_ TXD+ |
יציאת פלט איתות |
טווח טווח לארח מחשב |
|
P-5 |
Rs 422_ txd- |
||
|
P-6 |
Rs 422_ rxd- |
יציאת קלט איתות |
מחשב עליון למפריד טווח |
|
P-7 |
Rs 422_ rxd+ |
||
|
P-8 |
GND |
RS422 חוט קרקע |
חוט קרקע תקשורת |
|
P-9 |
Swdio |
/ |
/ |
|
P-10 |
Swclk |
/ |
מיקום חיבור מחבר 1 פין
תוֹכנָה
נְתוּנִים
העברת הנתונים בין מדד טווח למחשב המארח כוללת את הדברים הבאים:
* פקודות בקרה: כולל הוראות יחיד, 1Hz, 5Hz הוראות טווח, הוראות שאילתה וכו '.
* נתוני משוב: כולל מידע מרחק, טמפרטורת אווירה, סטטוס מד טווח וכו '.
חילופי הנתונים בין מד טווח למחשב המארח מאמצים את מצב התקשורת RS422, לבין שלו
המאפיינים הם כדלקמן:
* שיעור Baud: 38400 (מפעל)/9600/57600/115200;
* בניית בתים: סדר נמוך לפני, סדר גבוה אחרי;
* הרכב בתים: 1 התחלה סיביות, 8 פיסות נתונים, ללא בדיקה, סיביות עצירה אחת.
מֵידָע
הפורמט של פרטי פקודת הבקרה מוצג בטבלה הבאה.
פרטי פקודת בקרה שקיבלו מדריך הטווח
|
בייט |
לְהַדגִים |
נתוני בתים (מילות פקודה, נתונים, בדוק ביטים) |
הערות |
|
1 |
כותרת מסגרת |
0x55 |
|
|
2月5日 |
1 טינג: 0 xf 2 0 x 00 0 x 00 0 xf2 |
נתוני המשוב מוצגים בטבלה שלהלן |
|
|
1Hz נע: 0 xf 3 0 x 01 0 x 00 0 xf2 |
|||
|
5Hz נע: 0 xf 3 0 x 02 0 x 00 0 xf1 |
|||
|
עצור נע בין: 0 xf 3 0 x 00 0 x 00 0 xf3 |
|||
|
הגדרת קצב Baud: 0 xf 6 _ _0 xxx |
{{0}} הגדר את קצב Baud/100 (ייצוג hexadecimal), כאשר 0xxx הוא XOR של 2-4 בתים |
||
|
פקודה בדיקה עצמית: {{0}} xf 0 0 x 00 0 x 00 0 xf0 |
נתוני המשוב מוצגים בטבלה שלהלן |
||
|
הוראות שאילתה: 0 xf 8 0 x 00 0 x 00 0 xf8 |
|||
|
הגדרת ערך שער: 0 xf 4 ___ ___ 0 xxx |
{{0}} הוא ערך Strobe שנקבע (ייצוג hexadecimal), ו- 0xxx הוא הבלעדי או של 2 עד 4 בתים. |
||
|
6 |
סוף המסגרת |
0 xaa |
הערות:
שלח רק פקודת שאילתה לבדיקה עצמית: 0 xf 0 0 x 00 0 x 00 0 xf 0 לשאילתת מצב אור הלייזר;
אם שיעור Baud מוגדר לשיעור Baud שאינו שיעור Baud המוגדר, מגן הטווח לא יגיב.
נתוני ההחזרה של מד הטווח מחולקים לנתונים רגילים ולנתוני בדיקה עצמית.
* נתונים רגילים: כולל מספר היעדים, מרחק המדידה, מצב מד טווח וכו '. ראה את הטבלה שלהלן.
* נתוני שאילתה: כולל טמפרטורת הסביבה, סטטוס טווח וכו '. ראה את הטבלה שלהלן.
נתונים קונבנציונליים שהוחזרו על ידי מכונות מדידת מרחק
|
בייט |
לְהַדגִים |
ערך בייט (הקסדצימאלי) |
|
1 |
כּוֹתֶרֶת |
0 xaa |
|
2 |
מספר היעדים |
|
|
3 |
בתים גבוהים של מידע מרחק היעד הראשון |
|
|
4 |
בתים נמוכים של מידע מרחק היעד הראשון |
|
|
5 |
מידע על מרחק היעד הראשון ספרות עשרוניות |
שני מקומות עשרוניים אחרי הנקודה העשרונית |
|
6 |
בתים גבוהים של מידע למרחק היעד הקצה |
|
7 |
בתים נמוכים של מידע למרחק היעד הקצה |
|
|
8 |
מידע על מרחק יעד אחרון ספרות עשרוניות |
שני מקומות עשרוניים אחרי הנקודה העשרונית |
|
9 |
בייט סטטוס נע |
מילת סטטוס, ראה טבלה להלן |
|
10~13 |
מספר פלט האור |
|
|
14 |
בדוק את המילה |
Bytes 2-13 xor |
|
15 |
סוף המסגרת |
0x55 |
הערות:
רק כאשר מד המרחק מחשב את המרחק מהאזור העיוור לספירה המרבית, הנכון
תוצאת המדידה היא
מוצג. במקרים אחרים מוצג 0 xffff, שהוא מצב לא חוקי.
משמעות מילת הסטטוס
|
מספר סידורי |
בתים 9 |
מַשְׁמָעוּת |
|
1 |
0 xf2 |
1 נע |
|
2 |
0 xf3 |
1 הרץ נע |
|
3 |
0 xf4 |
טווח 5 הרץ |
|
4 |
0 xf5 |
תפסיק לנעול |
נתוני שאילתה שנשלחו בחזרה על ידי טווח טווח
|
בייט |
לְהַדגִים |
ערך בייט (הקסדצימאלי) |
|
1 |
כותרת מסגרת |
0 xcc |
|
2 |
המתנה |
המתנה |
|
3 |
בייט טמפרטורת הסביבה |
8- מספר חתום סיביות, יחידה: תואר |
|
4 |
בייט מידע על בדיקה עצמית |
00: ברירת מחדל |
|
FF: אור לייזר לא תקין |
||
|
03: אור לייזר הוא רגיל |
||
|
5 |
המתנה |
המתנה |
|
6 |
ערך סטרוב מרחק בתים גבוהים |
ייצוג הקסדצימאלי |
|
7 |
בתים נמוכים של ערך שער מרחק |
|
|
8 |
דרג Baud Byte גבוה |
ייצוג הקסדצימאלי, שיעור Baud הוא נתוני Loopback * 100 |
|
9 |
קצב Baud נמוך בתים |
|
|
10月13日 |
מספר פלט האור |
ייצוג הקסדצימאלי |
|
14 |
בדוק את המילה |
Bytes 2-13 xor |
|
15 |
סוף המסגרת |
0x55 |
הגדרות קצב Baud
שיטת הפעלה הגדרת קצב Baud:
1. שלח "0 x 55 0 xf 6 0 x 00 0 x 60 0 x 96 0 xxx" לפקודה לממצא טווח הלייזר, i .e. הגדר את קצב Baud ל 9600 bps; THE
Rangefinder מחזיר "cc {{0}}", "0x 00 0 x 60" מציין כי קצב Baud הנוכחי הוגדר ל- 9600bps;
1. שלח "0 x 55 0 xf 6 0 x 01 0 x 80 0 x 77 0 xxx" פקודה ל Rangefinder, i .e. הגדר את קצב Baud ל- 38400bps; THE
Rangefinder מחזיר "cc {{0}}", ו- "0x 01 0 x 80" מציין כי קצב Baud הנוכחי מוגדר ל- 38400bps;
1. שלח "0 x 55 0 xf 6 0 x 02 0 x 40 0 xb 4 0 xxx" פקודה לחיפוי הלייזר, כלומר, הגדר את קצב הבוד על 57600bs; THE
Rangefinder שולח חזרה "CC {{0}} B 55", ו- "0x 02 0 x 40" מציין כי קצב Baud הנוכחי הוגדר כ- 57600bps;
1. שלח "0 x 55 0 xf 6 0 x 04 0 x 80 0 x 72 0 xxx" פקודה ל Rangefinder, i .e. הגדר את קצב Baud ל- 115200bps; THE
Rangefinder מחזיר "cc {{0}} d 55", "0x 04 0 x 80" מציין ששיעור Baud הנוכחי היה Setto 115200bps.
מַגָע:
אם יש לך רעיונות, אתה מוזמן לדבר איתנו.
 Email: info@loshield.com
Email: info@loshield.com
 טל: 0086-18092277517
טל: 0086-18092277517
 פקס: 86-29-81323155
פקס: 86-29-81323155
 WhatsApp: 0086-18092277517
WhatsApp: 0086-18092277517
 פייסבוק
פייסבוק לינקדאין
לינקדאין לְצַפְצֵף
לְצַפְצֵף YouTube
YouTube אינסטגרם
אינסטגרם
תגים חמים: 1535 ננומטר לייזר לייזר לייזר מודול 4000 מ ', סין, יצרנים, ספקים, מפעל, מותאם אישית, סיטונאי, הטוב ביותר, זול, מקצועי, למכירה, ליד אותי, פלאש פטריות לייזר סיבוב אור קרן אור, גיליון לייזר לייזר 1070, גיליון לייזר לייזר, גיליון לייזר לייזר, 1020 נמלט לייזר, לייזר לייזר, טילוס לייזר, חלון מגן
תגיות פופולריות: טווח לייזר לייזר לייזר 5 ק"מ 5 ק"מ.


